robot end effector interface
The same kind of tendons are used to. If a multifingered robotic end-effector is to be operated in a confined space local actuation of the fingers needs to be fully considered even if there is a reduction in hand dexterity over that of.
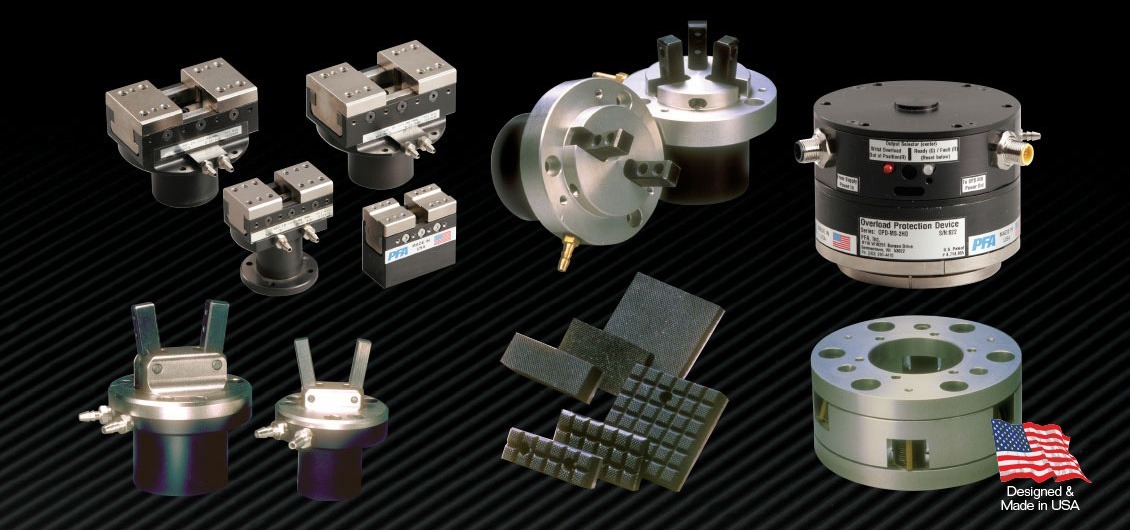
What Is An End Effector Eoat Pfa Inc
Robot EE Interface Endplate 2000 ASCO Author.
. Most end effectors are mechanical or electromechanical and serve as. An end effector is a device the robot uses to perform its proposed task. Standardization also makes things simpler for the operators.
Overload Protection When some unexpected event happens to the end effector such. Robot End-effector is classified into four general types based on physical effect usage to achieve a stable grasp amongst the gripper and the object to be grabbed. A robot end effector is an interface that allows a robot to interact with the environment physically by ensuring that the robot can interact with its surroundings.
Which electriconic print and where is it situated in the cabinet. Up to 3 cash back ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3. The haptic knob HK robot is a two-degree-of-freedom robotic hand interface for hand grasping and knob manipulation PP Lambercy et al 2007 2011The.
In a R30iA-cabinet where is the end effector interface connected to. Human-Robot Interface for end effectors 161 4. Explore Mecademics range of end effectors and EAOT accessories.
Robot Arm End Effectors. Discover our MEGP 25 electric parallel gripper and pneumatic module. Haptic knob robot.
ASCO - Emerson Subject. It provides services and topics specific to the End Effector Panel in order to be. An end effector is a peripheral device that attaches to a robots wrist allowing the robot to interact with its task.
A robot end effector is an interface that allows a robot to interact with the environment physically by ensuring that the robot can interact with its surroundings. Most end effectors are mechanical or electromechanical and. The Numatics 20052012 2035 series valve manifolds with EE-Interface Endplate allows.
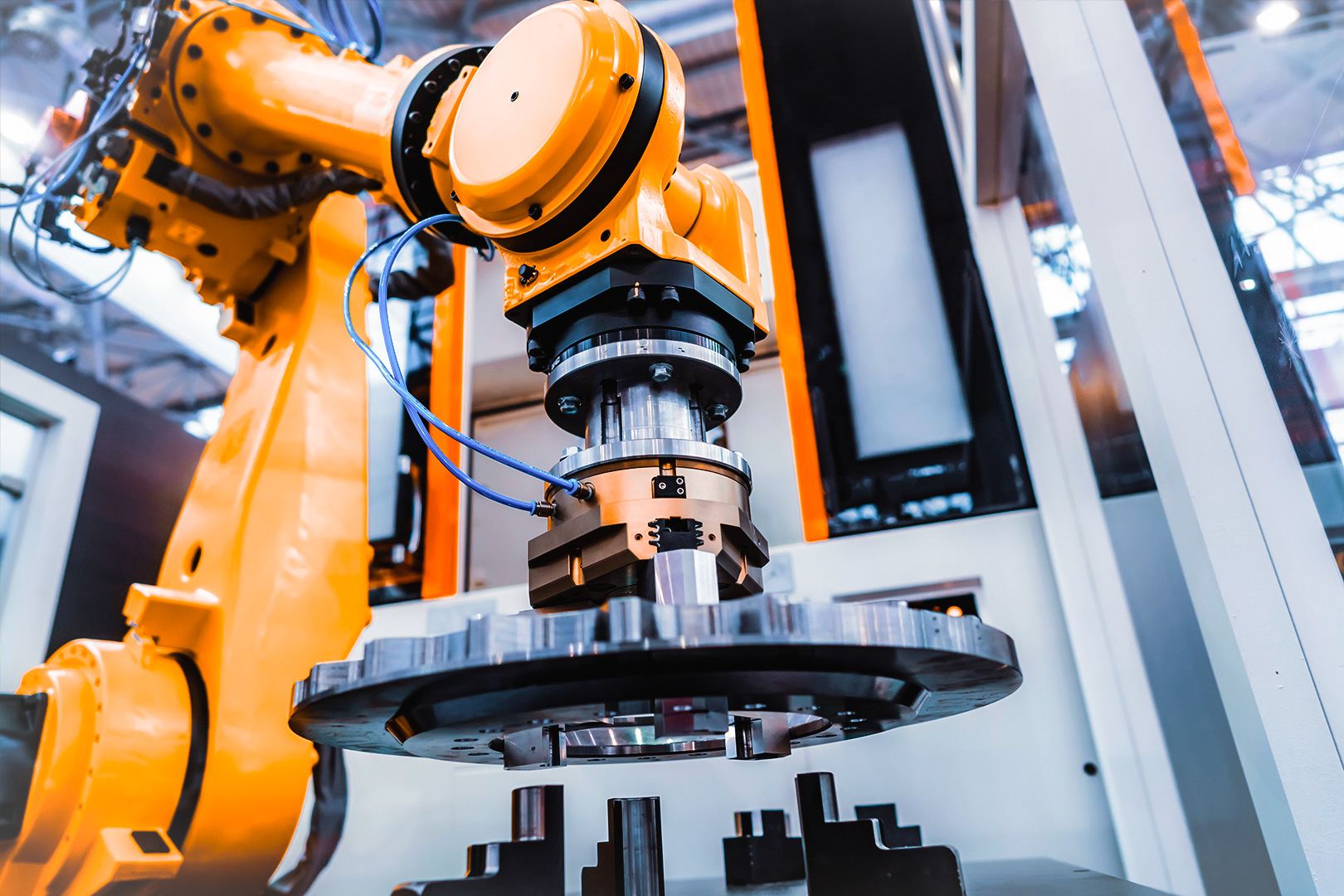
An end effector is a peripheral device that attaches to a robots wrist allowing the robot to interact with its task. Our end effectors can typically be pulled out of the box installed and operated within just a few hours versus the standard multi-day or multi-week process of setting up a custom-built end. They attach to the wrist of a six-axis robot or cobot.
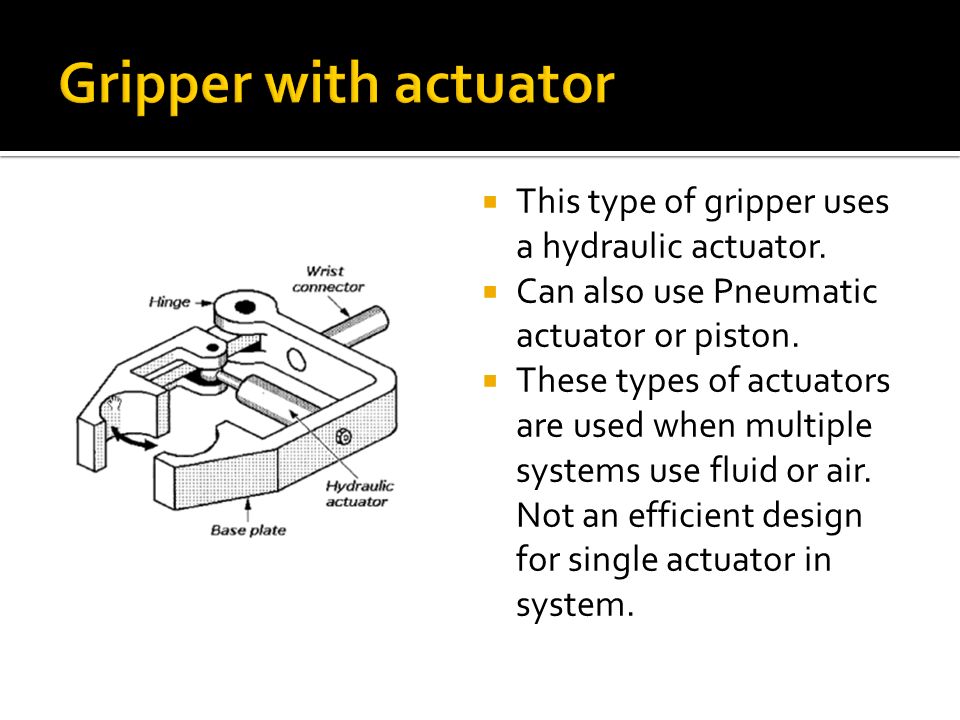
End effectors are also referred to as End of Arm Tooling EOAT. Often the end effector is a type of gripper that is used to manipulate parts. System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire.
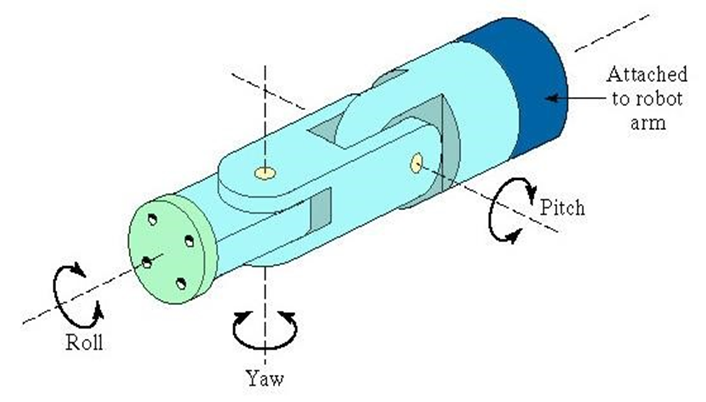
The same single robot can perform various tasks on a workpiece through the automated replacement of the end effector. Blueprint Bravo External End-Effector Interface Offers a versatile interface for Bravo manipulators Features 2 x 3mm dowel pin holes for accurate alignment Allows attachment of external. They alllow the robot to complete additional tasks.
This package handles the End Effector Panel of a robot it is supported from Ned 2.

Robot End Effector Definition And Examples

What Is An End Effector And How Do You Use One Robodk Blog
How To Program Any End Effector With Robodk Robodk Blog
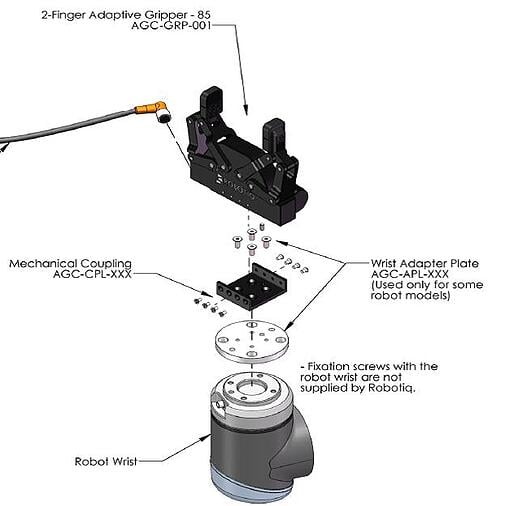
How To Choose The Right Mechanical Coupling For Your Robotic Gripper

Magnetic Robot End Effector Top 5 Pros And Cons
4 Robot End Of Arm Tooling Inlearc
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download
Spot Arm End Effector Payload Specification
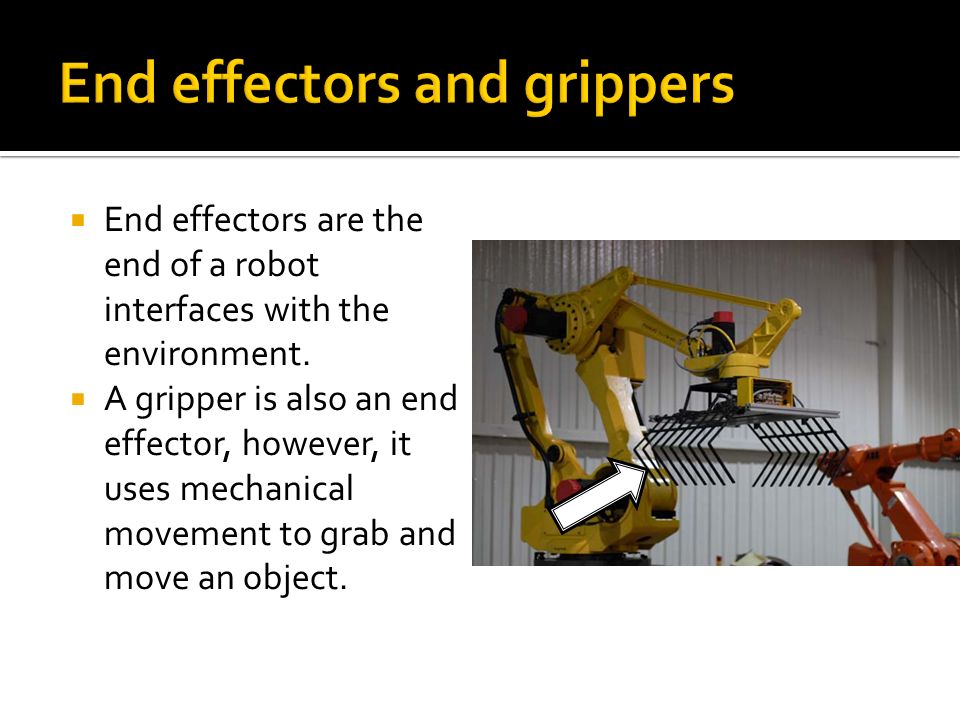
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download

A Ur5 Robot End Effector With A Tool A Tablet Pen And B One State Download Scientific Diagram
How To Program Any End Effector With Robodk Robodk Blog
What Is An End Effector And How Do You Use One Robodk Blog
What Is An End Effector And Or End Of Arm Tool Eoat Ferrobotics

Robotic Hand Rehabilitation Devices A An End Effector Device Haptic Download Scientific Diagram

Fanuc Robot End Effector Connection Interface By Asco Numatics Fluid Power

Control Ros Enabled End Effector Using Matlab Matlab Simulink

Constant Force Mechanism In Robot End Effector Download Scientific Diagram

Robot End Effector Definition And Examples

A Schematic Description Of Robot Manipulator And B Gripper Of Download Scientific Diagram